Free worldwide shiping on $150+
Tutorial Part 2: Drive, Map & Navigate Your Proscenic M6 Pro in ROS 2
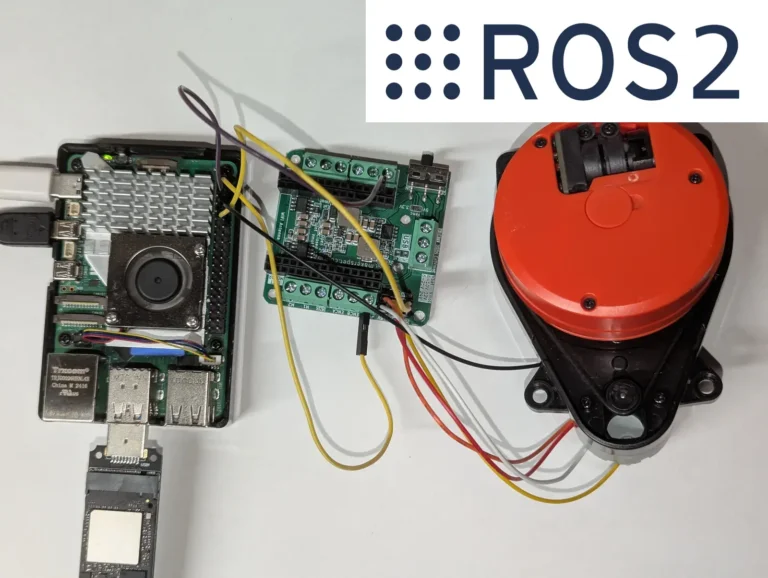
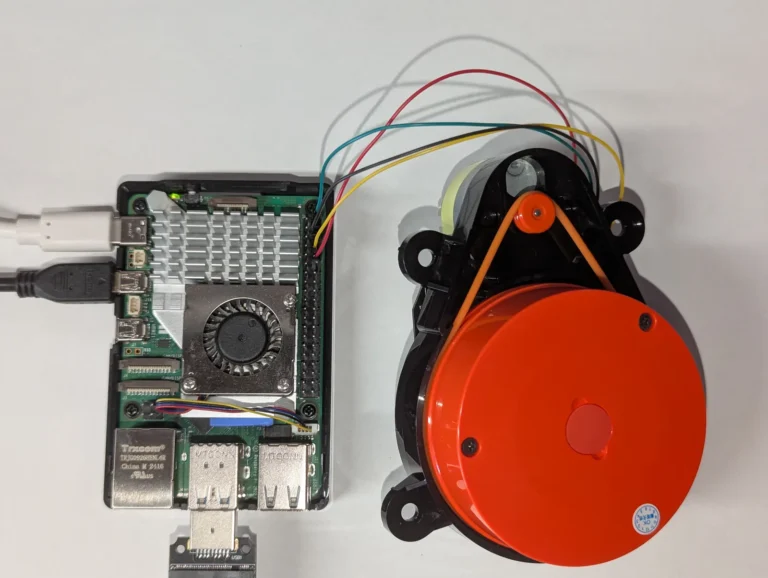
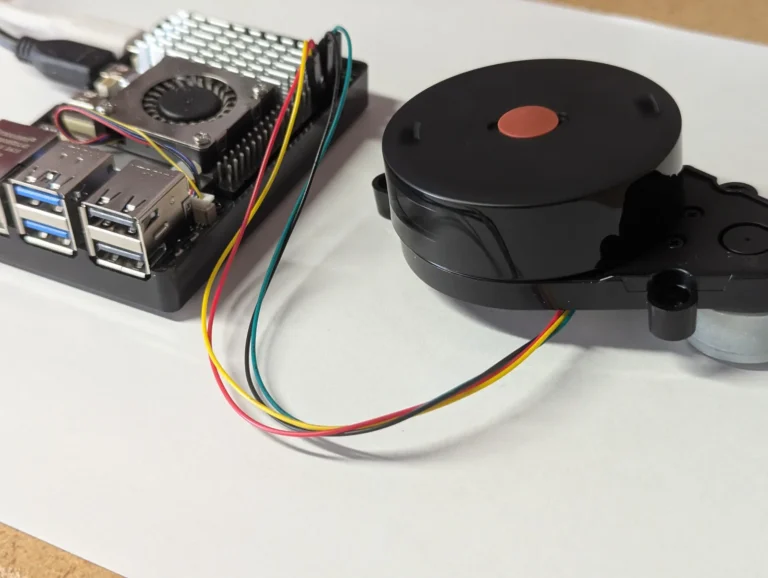
Tutorial Part 1 got SangamIO running on the vacuum, exposing its motors, wheel encoders, IMU and LiDAR over TCP port 5555. Part 2 connects that to ROS 2 the easy way — a prebuilt Docker image that already bundles everything:…