Free worldwide shiping on $150+

Loki 200mm, Fido pet robot build, bring-up instructions
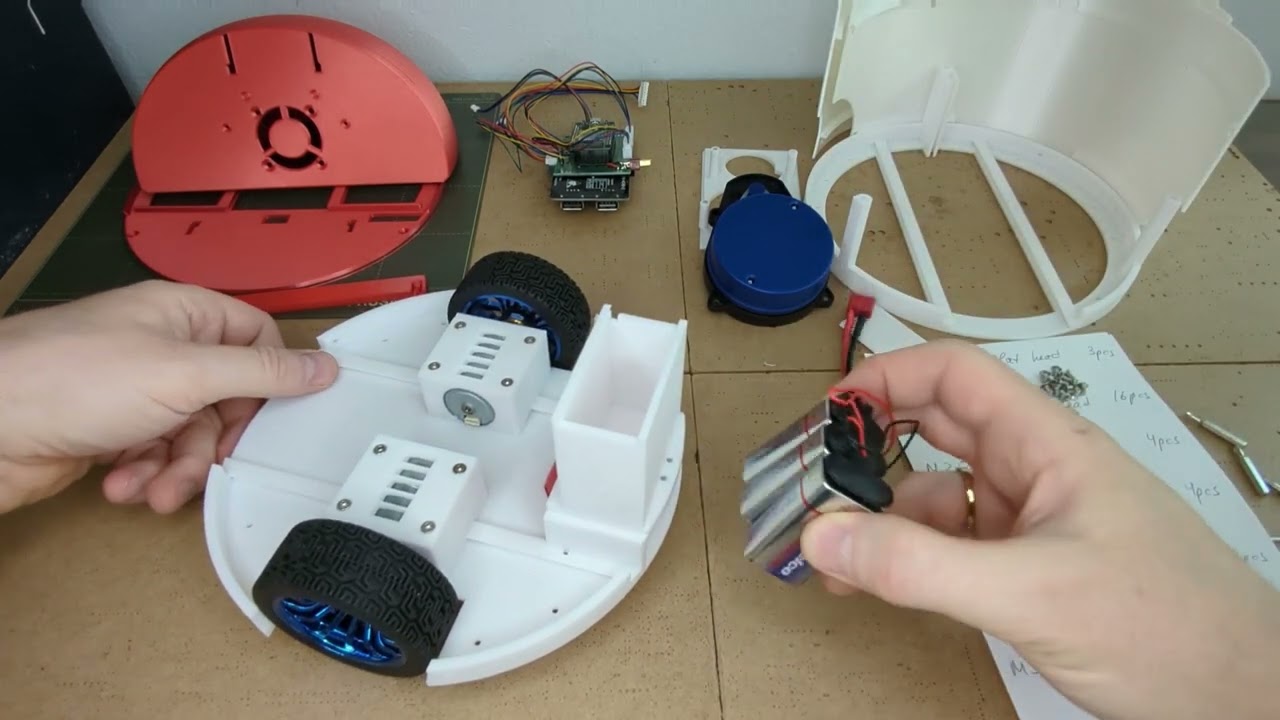
Here is Loki, a 200mm pet robot.
Loki’s dimensions is small enough to fit the widely used 210x250mm and 220x220mm
3D print volumes, so you don’t have to invest in a bigger 3D printer.
Loki comes with his bigger brother Fido, 250mm. Both robots are basically identical, except for the size.
Snoopy, a 300mm robot, is the oldest and the biggest brother in the family.
Once the software is finished, Loki will act as a pet – look cute, play ball, hide-and-seek and chase,
demand its owners’ attention and greet its owners happily at the door.
To get a feel of what Maker’s Pet robots will do, watch Loki’s big (300mm) brother
Snoopy (in a simulation)
under a table
- self-drive, map and navigate a living room, all automatically.
Utility functions will include patrolling the house.
You can download design files here:
Each design repository includes:
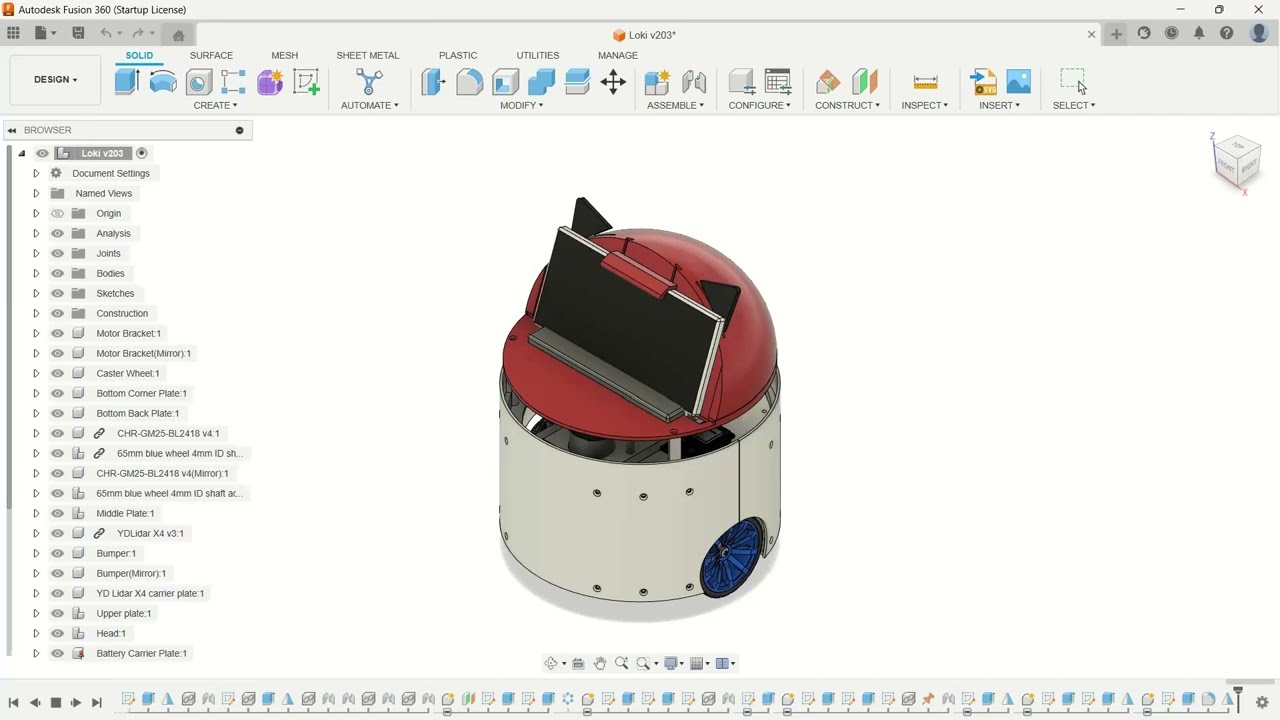
- Fusion 360 3D CAD design files
- 3MF, STL files for 3D printing
- Arduino firmware source code
- ROS2 robot description package, configuraiton files and a Gazebo simulation model
- KiCad electronics schematics, BoM; PCB layout is in the works
- Assembly documentation is in the works, including assembly and bringup videos
Step-by-step assembly instructions.
Get new tutorials by email
One-time robot and PC setup instructions.

Robot bring-up instructions video

Robot 3D printing instructions

Robot’s Arduino ESP32 breakout board setup instructions

CAD design animation (Fusion 360).
How LiDARs are used in self-driving robots?
Build a real LiDAR self-driving Arduino/ROS2 robot using our kit - with complete step-by-step instructions. No robotics experience necessary.
See the full robot kit →Loki’s head 3D printed
Loki’s head gets 3D printed using a silk red PLA on a Prusa MK3.5S.

Loki design notes
Loki is designed
- to be easily scalable to different sizes, including 250mm.
- to be modular – similar to Snoopy, but simplified
- the side body will be segmented and modular, unlike Snoopy’s,
so you can add body sensors – including ultrasonic, optical proximity,
collision, touch, laser pointer, optical distance – without reprinting
the entire Loki’s body. I would also venture a guess that – for now –
Roomba-like bumper collision sensors may not be necessary for a pet
robot.
- the assembly becomes simplified because, unlike Snoopy, by default,
Loki doesn’t have a bumper (to sense collisions), yet you can add
a bumper and collision sensors later if you wish so.
- the CAD design becomes simpler (including for myself)
- to be sturdier than Snoopy. The side walls now support upper plates.